Pentapod CNC & parallel kinematics
Spindle unit design and inverse-kinematics simulation for a pentapod CNC.
Mechanical DesignInverse kinematicsSimulation2021-2022
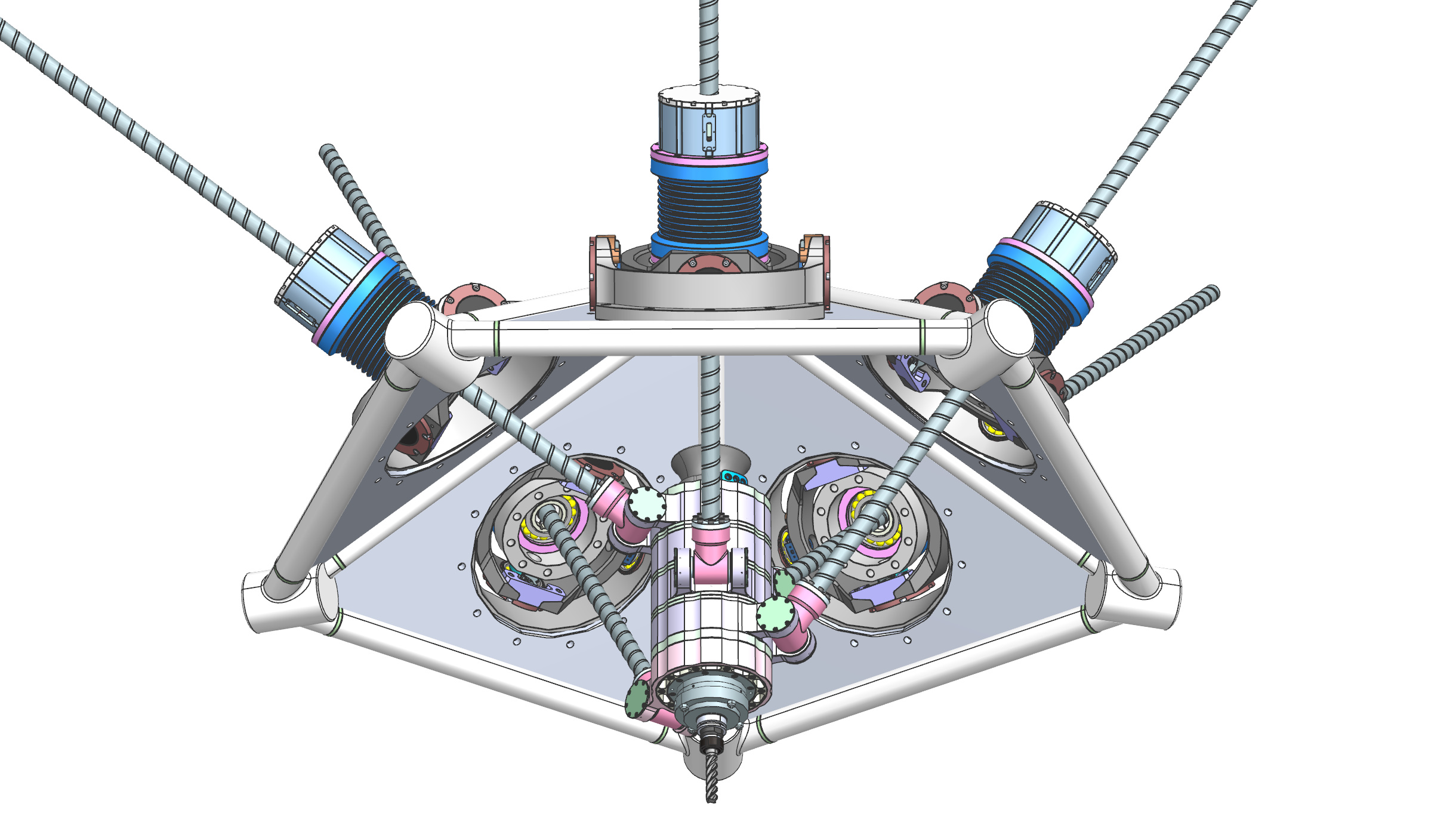
Designed the spindle-holder assembly and rotating joints for a 5-axis pentapod CNC.
Converted the full CAD assembly into a kinematic model and drove it via inverse kinematics.
Validated reachable workspace and mapped singularity regions to avoid unsafe poses.
Recorded actuator/joint angular velocities.